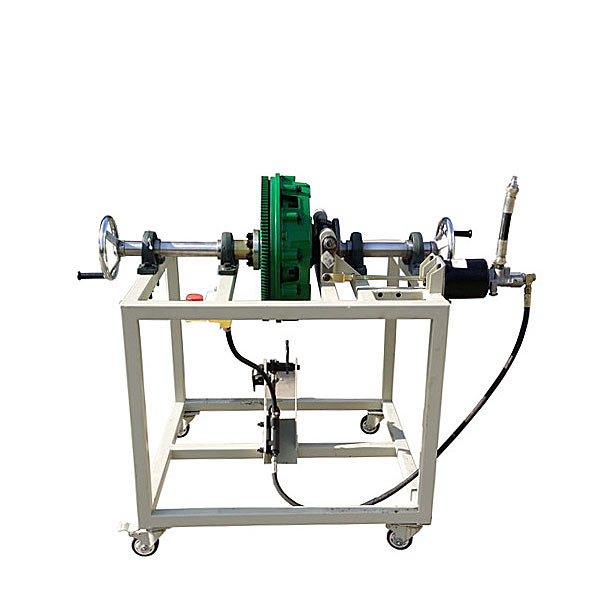
机电液气实验台为铝合金型材结构,在上面可安装上料单元、间歇式传送及夹紧单元、冲压单元、钻孔单元和分拣单元,并配有主机、变频器、触摸屏、、三相异步交流电机、交流减速电机、直流电机、液压机系统、钻机及其液压进给系统、气压传动系统等,构成一个典型的机电气液综合应用系统。可以进行典型机电气液一体化系统的安装、液压气动管路安装、电气控制线路布线、触摸屏与plc编程及调试、整机调试及运行等技能训练,从而使学生掌握机电气液的相关知识和技能。
")
参数及性能
1.工作电源:三相五线~380V±10%
2.外形尺寸:1400mm*960mm*750mm
3.微型液压动力源:额定功率 735W;额定排量 1.6mL/r;额定压力 6MPa
4.静音空气压缩机:工作电源AC220V±10% 50Hz,输入功率0.68kW,公称容积24L,额定流量:116L/min,额定输出气压1MPa
根据项目教学,主要完成的工作任务如下:
任务一:设备安装与调整
(1)上料、传送、夹紧、分拣等自动化机构的安装与调整;
(2)PLC、变频器、漏电断路器、开关电源等电气部件的定位安装及调整;
(3)气动部件的安装与调整;
(4)液压部件的安装与调整。
任务二:液压传动系统识图与管路安装
液压机、钻机进给系统、液压泵站等液压传动系统的识图与液压管路安装。
任务三:气动系统识图与管路安装
调压、换向、调速、顺序动作控制等气动系统的识图与气管安装。
任务四:电气控制线路原理图设计与布线
包含:根据工作流程和控制要求,设计自动控制系统的电气原理图,按原理图布置、连接控制系统电路。
任务五:程序编写与调试
各电气控制线路PLC程序及触摸屏界面的编写与调试。
任务六:机电气液一体化设备的整机调试与运行
包含:变频器控制参数设置,机械机构、液压传动与气动系统、触摸屏与PLC电控系统的调试与运行。
具体实训项目如下:
1. 供料单元的安装与调试的实训;
2. 加工单元的安装与调试的实训;
3. 钻孔单元的安装与调试的实训;
4. 分拣单元的安装与调试的实训;
5. 滑动单元的安装与调试的实训;
6. 自动生产线控制的安装与调试的实训;
7. 气动方向控制回路的安装;
8. 气动速度控制回路的安装;
9. 气动顺序控制回路的安装;
10. 气动系统安装与调试;
11. 气动综合系统的设计与安装;
12. 液压方向控制回路的安装;
13. 液压速度控制回路的安装;
14. 液压顺序控制回路的安装;
15. 液压系统安装与调试;
16. 液压综合系统的设计与安装;
17. 三相电动机正反转控制电路的连接与控制程序编写;
18. 三相电动机控制电路的连接与控制程序编写;
19. 电动机调速控制电路的连接与控制程序编写;
20. 变频器控制的连接与控制程序编写;
21. 模拟量控制液压电机的电路连接与控制程序的编写;
22. PLC控制网络控制技术;
23. 气动、液压方向控制程序编写;
24. 气动、液压顺序动作控制程序编写;
25. 皮带输送机控制程序编写;
26. 设备控制程序编写;
27. 自动生产线控制程序编写。
28. 传动装置同轴度的调整;
29. 供料单元的机械安装与调整;
30. 加工单元的机械安装与调整;
31. 钻孔单元的机械安装与调整;
32. 分拣单元的机械安装与调整;
33. 滑动单元的机械安装与调试;
34. 自动生产线设备安装与调试。
35. 机械构件的装配与调整能力;
36. 机电设备的安装与调试能力;
37. 电路安装能力;
38. 气动系统的安装与调试能力;
39. 液压系统的设计、安装与调试能力;
40. 变频器在自动生产线的使用能力;
41. PLC模拟量控制在自动生产线的使用能力;
42. 机电一体化设备的控制程序的编写能力;
43. 自动控制系统的安装与调试能力;
44. 人机界面、组态技术的编程与调试能力
四、实训内容
1.触摸屏实训
Ø 触摸屏与PLC之间的通讯实训
Ø 触摸屏监视电机的运行状态和控制电机的运行参数
Ø 利用触摸屏做交互式人机介面
Ø 基于触摸屏→PLC→数字伺服(步进驱动)方式的运行曲线组态显示控制
Ø 基于触摸屏→PLC→交直流电机方式的运行曲线组态显示控制
2.PLC训练
Ø 基本指令编程练习
Ø 高级指令编程实训
Ø PID控制指令应用实训
Ø 利用PLC(脉冲、模拟量)控制步进电机、交流减速电机、伺服电机、直流无刷电机
Ø 用PLC采集各种传感器信号
Ø PLC采集旋转编码器信号
3.三相异步电机变频调速
Ø 变频器功能参数设置与操作
Ø 变频器报警与保护功能
Ø 多段速度选择变频调速
Ø 外部端子点动控制
Ø 控制电机运行时间操作
Ø 控制电机正反转运动控制
Ø 外部模拟量(电压/电流)变频调速
Ø 三相异步电机的变频器闭环调速
4.步进电机
Ø 启动特性的研究:通过PLC修改频率,运行频率加速时间及运行长度,观察运转特性。
Ø 细分特性研究:通过细分拨码开关改变细分,观察步进电机在低速运行时的振动和噪声变化,掌握细分意义和如何计算细分距角
Ø 脱机信号作用研究
Ø 驱动电压的影响
Ø 驱动电流的影响
5.伺服电机
Ø 位置模式:通过PLC修改启动频率,运行频率,加减速时间以及运行长度,观察电机运转特性
Ø 速度模式1:将伺服电机的控制模式调整为速度模式的外部控制方式,通过PLC的模拟量控制伺服电机的运行,学会如何调速零漂、加减速的调整、速度增益和输入增益的调整,控制零速钳位端口了解它的作用,通过编码器反馈做闭环实现位置控制并通过人机界面进行位置和速度的显示
Ø 速度模式2:将伺服电机的控制模式调整为速度模式的内部控制方式,通过PLC的脉冲输出和模拟量输出控制电机的速度和位置,两个模式通过PLC的输出点来切换,通过这个实训可以了解伺服ON与模式切换之间的关系,通过PLC编程加深对伺服运行的理解
Ø 位置速度模式:将伺服电机的控制模式调整为位置速度模式,通过PLC的脉冲输出和模拟量输出控制电机的速度和位置,两个模式通过PLC的输出点来切换,通过这个实训可以了解伺服电机ON与模式切换之间的关系,通过PLC编程加深对伺服运行的理解
6.直流无刷电机
Ø 内部电位器调速:调节电位器使速度由慢到快,观察电机在低速和高速和运行特性,比较与伺服的区别
Ø 模拟量调速:PLC模拟量输出控制电机的速度,编码器反馈作为速度位置反馈,实现低精度的定位。通过正反向控制端子控制转向
7.各种传感器及编码器实训
Ø 光电传感器
Ø 电感传感器
Ø 电容传感器
Ø 旋转编码器
8.皮带输送带电机综合控制(PLC、触摸屏、异步电机、直流无刷电机、编码器)
9.丝杠传动综合控制(PLC、触摸屏、步进电机、伺服电机)
10.转动摆台定位控制(PLC、触摸屏、步进电机、伺服电机)
五、系统配置
该装置采用型材结构,其上安装有交流伺服电机及驱动单元、步进电机及驱动单元、直流无刷电机及驱动单元、交流电机及变频调速单元、触摸屏单元、PLC及A/D D/A单元、传感器及旋转编码器单元、皮带输送单元、滚珠丝杠单元、蜗轮蜗杆单元等组成。培训内容包含:PLC(数字量和模拟量)技术,传感器及旋转编码器技术、直流无刷电机特性研究、步进电机特性研究、交流伺服电机特性研究、特种电机控制技术、触摸屏技术、位置及速度控制技术、机械传动(皮带传动、滚珠丝杠传动及蜗轮蜗杆传动)技术、组态软件监控技术等。平面模块化结构,所有控制电机的接线开放,安装尺寸完全一致,可做到电机互换,控制电平一致。学生可以对各零件、部件、单元、直至整体机构进行零部件拆装、调试、运行。基于C#和JS语言编程设计,用户自行根据电脑配置选择不同的交互界面大小,可选流畅画质,中等画质,完美画质等六级画质等级。可选择齿轮轴系、蜗杆轴系等十多种轴系机构进行安装、拆卸、装配、零部件测量、考核等。零件拆装的步骤过程中有智能提醒,软件内的模型均采用3D模型,由3Dmax制作而成,并经过渲染和润色,使模型看起来与真实部件一般无二,设有非标零件库、标准零件库、测量工具库供拆装选择。软件内配有实验的目的、步骤、要求等集成的电子实验考核题及指导书。使用考核功能时,软件随机出题供学生回答,当学生答完题目时给出考核分数。本软件可以进行全方位旋转、放大、缩小观看其细节。
虚拟仿真系统
1.维修电工电子电机与职业资格培训考评仿真软件
本软件为apk的格式,可在PC端使用,也可在移动端使用,本软件即可手动设置故障也能自动设置故障,本软件通过电路图中绿色的框选择手动设置故障点(最多可以设置39个故障点),也可以通过系统自动进行随机1个故障点设置,随机两个故障点设置,随机三个故障点设置,随机四个故障点设置,随机五个故障点设置,本软件内有工具箱,元件库,放大镜,电路图等功能,可通过工具箱可选择万用表进行检测,通过元件库选择合适的元件,通过放大镜可以清楚的了解各个元器件及电路。本软件通过电动机星三角启动控制电路故障的设置,并经过种种排查,让学生了解电动机星三角启动控制电路的工作原理及电路结构。
2.虚拟频谱仪、逻辑分析仪、示波器、三用表仿真软件:
本软件为apk的格式,可在PC端使用,也可在移动端使用,本软件的功能有:电阻的测量、交流电压的测量(测量变压器,若变压器测量烧坏多用表时,冒黑烟提示并可以重置多用表)、晶体管的极性判断、直流电压测量(通电流表档时灯光亮)、直流电流的测量、以及电容好坏的判断。本软件可任意拖动红色与黑色笔头,2个笔头拖拽至被测物体上定位时显示红圈,如未定位准确无红圈显示,并在进行错误操作的时(如所选量程错误、所测数据错误等等),仪表指针将无反应、提示错误重新测量等,本多用表可选择交流电压档,直流电压档,电阻档,电流档,电阻调0,并且可放大显示数据,可清楚观看所测数据大小。学生可以通过本软件学习多用表的正确使用方法。
3、单片机、plc可编程设计与控制虚拟仿真软件:
本软件基于unity3d开发,内置实验步骤、实验指导书、电路图、组件列表、连接线路、接通电源、电路图、场景重置、返回等按钮,在连线及代码正确后,可以通过启动/停止、正向运动、反向运动按钮操作三维机床模型运动,在连接线路状态下,三维机床模型可进行放大/缩小、平移。
1.继电器控制:阅读实验指导书,并进入实验,通过识读电路图,选择组件列表中的继电器、热继电器、开关等元器件以拖拽的形式布局至电器柜中,限位器置于三维机床模型上,可选择盖盖子,部分元器件名称可重命名,然后点击连接线路按钮,将端子对端子进行连线,将机床电路连接成功后,选择接通电源,进行操作,若组件或线路连接错误将弹出提示错误框,可随时进行场景重置。
2.PLC控制:实验同继电器控制,增加PLC控制功能,在连线完成后,通过PLC编码按钮,进入程序编写界面,编写正向与反向2条程序,共有12个梯形图符号,编写完成后,选择提交进行程序验证。验证成功后,接通电源进行操作,组件、线路连接、代码错误将弹出提示错误框,可随时进行场景重置。
3.单片机控制:实验同继电器控制,增加单片机控制功能,在连线完成后,通过C编码按钮进入编程界面,输入正确的C语言代码,提交验证成功后,接通电源进行操作,组件、线路连接、代码错误将弹出提示错误框,可随时进行场景重置。
表1:基本配置表(标准配置)
|
序号 |
名称 |
规格 |
数量 |
单位 |
备注 |
|
1 |
工作台 |
1200mm×800mm×840mm |
1 |
张 |
|
|
2 |
PLC模块 |
西门子CPU ST30(DC/DC/DC)+EM AM06(4路模拟量输入、2路模拟量输出) |
1 |
台 |
标准配置 |
|
3 |
变频器模块 |
西门子MM420 功率≥0.75kW |
1 |
套 |
标准配置 |
|
4 |
电源模块 |
三相电源总开关(带漏电和短路保护)1个、熔断器3只、单相三极电源插座2个、安全插座5个 |
1 |
块 |
|
|
5 |
按钮模块 |
开关电源24V/5A 、12V/2A各1组、转换开关2只、复位按钮(红、黄、绿各1只)、自锁按钮(红、黄、绿各1只)、24V指示灯(红黄绿各2只)、急停按钮1只、蜂鸣器1只 |
1 |
块 |
|
|
6 |
步进电机驱动模块 |
相数:2,步距角: 1.8,静态电流:2.8A,相电阻:0.8Ω,相电感:1.2mH,保持转矩:0.9N•m |
1 |
套 |
|
|
7 |
伺服电机驱动模块 |
额定功率:200W,额定转矩:0.64N•m,额定转速:3000r/min,额定电流:1.6A |
1 |
套 |
|
|
8 |
直流无刷电机驱动模块 |
额定功率: 150W,额定电压:AC220V 额定转速:1500r/min,额定转矩:0.955N•m,额定电流:0.945A |
1 |
套 |
|
|
9 |
触摸屏模块 |
7寸 昆仑通态TPC7062 |
1 |
套 |
|
|
10 |
皮带输送带单元 |
由带式传送带、旋转编码器、光电传感器、电感传感器、电容传感器、旋转电磁铁组成。传输带行程:460mm |
1 |
套 |
|
|
11 |
滚珠丝杆单元 |
由滚珠丝杆、刻度装置、限位传感器、移动导块等组成。位置控制水平位移:270mm,重复精度:0.1mm |
1 |
套 |
|
|
12 |
蜗轮蜗杆减速机单元 |
由蜗轮蜗杆减速机、刻度装置等组成。超低噪声,体积小,传递功率为90-120W,主要可以完成转台的精确定位控制 |
1 |
套 |
|
|
13 |
接线端子排 |
本系统的执行器、控制器接口全部引到操作面板及接口单元,并配备配套实训导线 |
1 |
套 |
|
|
14 |
工件 |
含金属、塑料工件 |
1 |
套 |
|
|
15 |
电源线 |
单相三芯电源线 |
2 |
根 |
|
|
16 |
实训导线 |
强电、弱电连接导线 |
1 |
套 |
|
|
17 |
PLC编程电缆 |
配套通信编程电缆 |
1 |
根 |
|
|
18 |
配套光盘 |
PLC编程软件、使用手册、程序等 |
1 |
套 |
|
|
19 |
配套工具 |
工具箱:十字长柄螺丝刀、大、中、小号一字螺丝刀,中、小号十字螺丝刀,钟表螺丝刀,剥线钳,尖嘴钳,剪刀,电烙铁,验电笔,镊子,活动扳手,内六角扳手(8把) |
1 |
套 |
|
|
20 |
挂线架 |
欧式导线架 |
1 |
个 |
|
|
21 |
电脑桌 |
型材电脑桌 |
1 |
张 |