一、 产品概述
本装置是根据人力资源和社会保障部制定的“可编程序控制系统设计师”培训及国家职业标准考核大纲内容,适当增加新技术,按照职业教育培训、职业技能鉴定和实训教学要求而研制的。适合职业院校、职业培训学校、职教中心、鉴定站/所对可编程序控制系统设计师的四、三、二级开展培训及技能鉴定。
二、 研发背景
1. 本装置是根据人力资源和社会保障部制定的“可编程序控制系统设计师”培训及国家职业标准考核大纲内容,适当增加新技术,按照职业教育培训、职业技能鉴定和实训教学要求而研制的。
2. 工业迅速发展处理器要求不断提高,教学需要与时俱进设备要不断升级,而教学还需要从基础学起,同时满足需要实验室建设重复会导致浪费资金和实验室空间。
3. 一个产品需要多种加工工艺,导致工业现场设备错纵复杂,一个主机不能完成所有工作,需要多个站点进行相互配合完成。
4. 不同层次的考核需要不同设备,不能有机的进行结合,有些实训完成后无法进行考量检查学生的接受程度。
三、 产品特色
1. 实训建设理念为一次性建设,本设备采用通用型宽展口,所有主机的I/O口都可通过扩展口引出,可以用于插接式训练,也可进行线接式实操训练;还设有两块可拆卸的网孔板可对不同层次的学生进行考核。
2. 在主机选型方面由小型FX3U系列plc到中型FX5U系列PLC再到大型Q系列PLC,全面覆盖了三菱常用PLC类型,主机可以通过并口连接到实训区进行实训,可从基础小型PLC开始学起,再到中型PIC,到大型PLC,由简到繁的学习理念让学生容易接受,学习起来更加得心应手。
3. 采用模块组合式结构,含开关量、模拟量、变频调速、触摸屏、通信模块等,配套MCGS工控组态监控软件,实现仿真化、信息化实训教学。
4. 项目实训模块:利用目前典型的可编程控制器及总线技术完成对工业生产中典型案例的模拟对象、实物模型中的逻辑、模拟、过程、运动等的控制。
5. 仿真实训教学:通过虚拟环境实时显示PLC运行状态,模拟工业现场控制,可以进行编程训练、程序编写测试等功能。
6. 模块化网络系统:网络结构主要由三菱主机Q03UDV、FX5U-32MT、FX3U-32MT构成,根据工业中三菱PLC应用历程构建了一个工业网络,网络通讯涉及CCLINK通讯、三菱变频器专用协议,主从站通讯、以太网通等多层网络通讯。
四、 技术性能
1. 输入电源:三相四线(或三相五线)AC380V±10% 50Hz
2. 装置容量:<0.5kVA
3. 重 量:100kg
4. 外形尺寸:1310mm×700mm×1780mm
5. 安全保护:具有漏电压、漏电流保护装置,安全符合国家标准。
6. 虚拟多用表参数:
交流电压量程档位分:10、50、250、1000
直流电压档位分:0.25、1、2.5、10、50、250、1000
欧姆档分:x1,x10,,100,,1000,,1K,x10K,x100K
电流表档位:50μa、0.5、5、50、500
BATT:1.2-3.6V,RL=12Ω
BUZZ:R×3
红外发射检测功能:垂直角度±15°距离1-30cm
三极管测量孔
五、 基本配置及功能
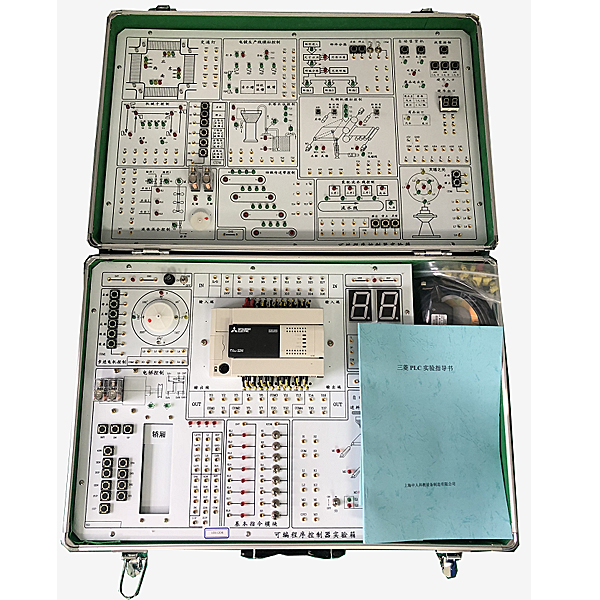
实训装置由实训平台、电源模块、PLC模拟控制模块、Q03UDV、FX5U-32MT、FX3U-32MT、变频调速单元、触摸屏单元、以太网交换机、二维控制单元、电工基础实训单元、交流电机、型材电脑桌及实验导线等组成。相关电气部件接口采用多功能端子引出,具有插孔式实验验证和接线式工程训练两种方式,可由学生自主搭建相关电气控制线路。
1. 实训平台
平台采用立式网孔板结构,由工业铝型材搭建而成,左侧网孔板为固定式结构;右侧为两块可拆卸的网孔板,底部设有带刹车万向轮,方便移动布局,造型美观大方。
2. 电源模块
提供三相380V交流电源,同时可得到单相220V交流电源。交流电源输出处设有智能设备管控及安全保护系统,当相间、线间过电流及直接短路均能自动保护。并提供直流24V/5A电源。
3. PLC模拟控制模块
学生在标准的PLC的编程环境编写好控制程序后,编译下载到PLC进行实训,实现对虚拟场景的实时控制。挂箱侧重于学习PLC应用模拟控制编程实训,用手枪插式护套结构实训连接线搭建实训线路。
可完成数码显示控制、抢答器控制、天塔之光控制、音乐喷泉控制、十字路口交通灯控制、水塔水位控制、自动送料装车系统控制、四节传送带控制、装配流水线控制、多种液体混合装置控制、自控成型机控制、自控轧钢机控制、邮件分拣机控制、自动售货机控制、机械手控制控制、三层电梯控制、加工中心控制、自动洗衣机、电镀生产线等实训项目。
4. 三菱Q03单元 (或西门子1500单元)
三菱Q03单元:存储程序重复运算[输入输出控制方式] 刷新方式(通过指定直接访问方式输入输出(DX□、DY□)时,可以进行直接访问方式的输入输出 )[程序语言(顺控程序控制语言)] 继电器符号语言、逻辑符号语言、MELSAP3(SFC)、MELSAP-L、功能块、结构化文本 (ST)[处理速度(顺控程序指令)] LD X0 1.9ns;MOV D0 D1 3.9ns[恒定扫描(用于保持扫描时间恒定的功能)] 0.5~2000ms(可以以0.1ms为单位进行设置)(根据参数设置)[程序容量] 30K步(120K字节)[存储器容量] . 程序存储器(驱动器0):120K字节. 存储卡(SD)(驱动器2):可安装SD存储卡(SD/SDHC)容量(32G字节 ). 标准RAM(驱动器3)未使用扩展SRAM卡盒时:192K字节使用扩展SRAM卡盒时:未使用扩展SRAM卡盒时的容量+扩展SRAM卡盒的容量(扩展SRAM卡盒8M字节 ).标准ROM(驱动器4):1025.5K字节.CPU共享存储器:8K字节多CPU间高速通信区域:32K字节[存储文件个数]. 程序存储器:124. 存储卡(SD)SD:根文件夹*多512个、子目录*多65534个SDHC:根文件夹*多65535个、子目录*多65534个. 标准RAM:使用/未使用扩展SRAM卡盒时都为323. 标准ROM:256[智能功能模块参数*多设置个数] 初始设置4096,刷新时2048[程序存储器的写入次数] *多10万次[标准 ROM 的写入次数] *多10万次[输入输出软元件点数(程序上可使用点数)] 8192点(X/Y0~1FFF)[输入输出点数(实际输入输出模块的可访问点数)] 4096点(X/Y0~FFF)[CPU内置以太网端口的规格] . 数据传送速度:100/10Mbps. 通信模式:全双工/半双工. 传送方法:基带. 集线器与节点的*长距离:100m. 节点数/连接:10BASE-T串联连接*多4级、100BASE-TX串联连接*多2级. 连接数:套接字通信、MELSOFT连接及MC协议合计16个,FTP用1个[锁存(停点保持 )范围] L0~8191(默认值8192点)(可以为B、F、V、T、ST、C、D、W设置锁存范围)(通过参数设置)[RUN/PAUSE触点] 可以在X0~1FFF中设置RUN/PAUSE触点各1点(通过参数设置 )[允许瞬停时间] 0.58A(CPU模块本体)/0.6A(安装扩展SRAM卡盒时)
西门子1500单元:主机1511C-1PN,CPU自带显示屏;工作存储器可存储175KB代码和1MB数据;位指令执行时间60ns;4级防护机制,工艺功能,运动控制,闭环控制,计数与测量;跟踪功能;PROFINETIO控制器,支持RT/IRT,性能升级PROFINET V2.3,支持MRP、MRPD,传输协议TCP/IP,安全开放式用户通信,S7通信,Web服务器,DNS客户端,OPC UA 服务器数据访问;自带DI16/DQ16,*5/AQ2,数字量输入模块DI 16xDC24V,16个一组;数字量输出模块DQ 16xDC24V/0.5A,16个一组;模拟量输入模块* 4xU/I、* 1xRTD,16位,5个一组;模拟量输出模块AQ 2xU/I,16位,2个一组;6个通道用于计数与测量,带增量式编码器24V(100kHz);4个通道用于PTO;脉宽调制;频率输出(100kHz)。CP1542-5通信模块,用于将S7-1500连接到PROFIBUS DP,支持DP主站或DP从站,S7和PG/OP通信,时钟同步,自带诊断功能。
多功能端子,电气接口采用多功能端子引出,具有插孔式实验验证和接线式工程训练两种方式,可由学生自主搭建相关电气控制线路。
单片机、plc可编程设计与控制虚拟仿真软件:本软件基于unity3d开发,内置实验步骤、实验指导书、电路图、组件列表、连接线路、接通电源、电路图、场景重置、返回等按钮,在连线及代码正确后,可以通过启动/停止、正向运动、反向运动按钮操作三维机床模型运动,在连接线路状态下,三维机床模型可进行放大/缩小、平移。
继电器控制:阅读实验指导书,并进入实验,通过识读电路图,选择组件列表中的继电器、热继电器、开关等元器件以拖拽的形式布局至电器柜中,限位器置于三维机床模型上,可选择盖盖子,部分元器件名称可重命名,然后点击连接线路按钮,将端子对端子进行连线,将机床电路连接成功后,选择接通电源,进行操作,若组件或线路连接错误将弹出提示错误框,可随时进行场景重置。
PLC控制:实验同继电器控制,增加PLC控制功能,在连线完成后,通过PLC编码按钮,进入程序编写界面,编写正向与反向2条程序,共有12个梯形图符号,编写完成后,选择提交进行程序验证。验证成功后,接通电源进行操作,组件、线路连接、代码错误将弹出提示错误框,可随时进行场景重置。
单片机控制:实验同继电器控制,增加单片机控制功能,在连线完成后,通过C编码按钮进入编程界面,输入正确的C语言代码,提交验证成功后,接通电源进行操作,组件、线路连接、代码错误将弹出提示错误框,可随时进行场景重置。
5. FX5U单元(或西门子1200单元)
FX5U单元:高速计数器功能、脉冲宽度测定功能、输入中断功能、PWM输出功能。定位功能二、FX5-16ET/ES-H产品规格说明1、输入规格[输入点数] 8点[连接形式] 端子排(M3螺丝)[输入形式] 漏型/源型[输入信号电压] DC24V +20%、-15%[输入信号电流] 5.3mA/DC24V[输入阻抗] 4.3kΩ[输入ON灵敏度电流] 3.5mA以上[输入OFF灵敏度电流] 1.5mA以下[输入响应频率] X□~X□+5为200kHz、X□+6、X□+7为10kHz[输入响应时间(H/W 滤波器延迟)] . X□~X□+5:2.5μs以下. X□+6、X□+7:ON时30μs以下、OFF时50μs以下[输入响应时间(数字式滤波器设定值)] 无、10μs、50μs、0.1ms、0.2ms、0.4ms、0.6ms、1ms、5ms、10ms (初始值)、20ms、70ms在噪音较多的环境中使用时, 请对数字式滤波器进行设定。[输入信号形式] 无电压触点输入漏型:NPN集电极开路型晶体管源型:PNP集电极开路型晶体管[输入回路绝缘] 光耦绝缘[输入动作显示] 输入接通时LED灯亮2、输出规格[输出点数] 8点[输出种类] 晶体管/漏型输出[外部电源] DC5~30V[负载] 1.6A/8点公共端[开路漏电流] 0.1mA以下/DC30V[ON时压降] . Y□、Y□+1、Y□+4、Y□+5:1.0V以下. Y□+2、Y□+3、Y□+6、Y□+7:1.5V以下[响应时间] . Y□、Y□+1、Y□+4、Y□+5:2.5μs以下/10mA以上(DC5~24V). Y□+2、Y□+3、Y□+6、Y□+7:0.2ms以下/200mA以上(DC24V)[输出回路绝缘] 光耦绝缘[输出动作显示] 输出接通时LED灯亮
西门子1200单元:主机1215C,工作存储器125 KB;工作电源24VDC,自带DI14/DQ10,*2/AQ2板载 DI14 x 24VDC 漏型/源型,板载 DQ10 x 24VDC 及 *2 和 AQ2;板载 6 个高速计数器和 4 个脉冲输出;支持3 个用于串行通信的通信模块,8 个用于 I/O 扩展的信号模块;运行速度0.04 ms/1000 条指令;具有2 个 PROFINET 端口,用于编程、HMI和 PLC 间数据通信。
多功能端子,电气接口采用多功能端子引出,具有插孔式实验验证和接线式工程训练两种方式,可由学生自主搭建相关电气控制线路。
5. FX3U单元(或S7-200SMART单元)
FX3U单元:电源电压:DC24V +20% -15%纹波(p-p) 5%以内,允许瞬时停电时间:对5ms以下的瞬时停电会继续运行,电源丝:125V 3.15A,冲击电流:30A 0.5ms/DC24V, DC5V内部供电电源(mA):560【FX3UC-32MT/DDC24V漏型输入规格】,输入形式:DC24V漏型输入点数:16点,输入连接方式:连接器,输入信号电压:DC24V+20% -15%纹波(P-P) 5%以内,输入阻抗:.9KΩ(X000~X005);3.3KΩ(X006~X007);4.3KΩ(X010以后); 输入信号电流:6mA/DC24V (X000~X005);7mA/DC24V (X006~X007);5mA/DC24V (X010以后); 输入灵敏度电流:OFF->ON 3.5mA(X000~X005);4.5mA(X006~X007);3.5mA(X010以后);ON->OFF 1.5mA,输入响应时间:约10ms,输入信号形式:无电压触点输入或是NPN集电极开路型晶体管,回路隔离:光耦隔离,输入动作显示:输入接通时LED灯亮, 输入回路的结构图,【FX3UC-32MT/D晶体管漏型输出规格】,输出形式:晶体管漏型输出,输出点数:16点,输出连接方式:连接器,外部电源:DC5~30V,电阻负载:0.3A/1点(Y000~Y003),0.3A/1点(Y004以后),电感性负载:7.2W/1点DC24V (Y000~Y003),2.4W/1点DC24V(Y004以后),开路漏电流:0.1mA以下/DC30V,ON电压:1.5V以下, 输出响应时间:Y000~Y002:5μs以下/10mA以上(DC5~24V)Y003:FX3uc-口口MT/D 0.2ms以下/100mA (DC24V时)Y004以后:0.2ms以下/100mA (DC24V时),回路隔离:光耦隔离,输出动作显示:输入接通时LED灯亮
S7-200SMART单元:主机CPU ST30,工作电源24VDC,工作存储器64KB,集成数字量I/O(18路数字量输入/12路数字量输出)、集成3路高速脉冲输出,4路高速计数;支持RS-485和以太网通信。配套西门子step7正版授权软件。STEP7通讯模块DP01,用于将S7-200SMART连接到PROFIBUS DP,工作电压DC24V,支持DP从站,时钟同步,自带诊断功能。
多功能端子,电气接口采用多功能端子引出,具有插孔式实验验证和接线式工程训练两种方式,可由学生自主搭建相关电气控制线路。
虚拟频谱仪、逻辑分析仪、示波器、三用表仿真软件:
本软件为apk的格式,可在PC端使用,也可在移动端使用,本软件的功能有:电阻的测量、交流电压的测量(测量变压器,若变压器测量烧坏多用表时,冒黑烟提示并可以重置多用表)、晶体管的极性判断、直流电压测量(通电流表档时灯光亮)、直流电流的测量、以及电容好坏的判断。本软件可任意拖动红色与黑色笔头,2个笔头拖拽至被测物体上定位时显示红圈,如未定位准确无红圈显示,并在进行错误操作的时(如所选量程错误、所测数据错误等等),仪表指针将无反应、提示错误重新测量等,本多用表可选择交流电压档,直流电压档,电阻档,电流档,电阻调0,并且可放大显示数据,可清楚观看所测数据大小。学生可以通过本软件学习多用表的正确使用方法。
6. 触摸屏单元
触摸屏单元采用昆仑通态 7寸彩色触摸屏TPC7062TI,用于PLC主机以太网通讯,控制和显示各单元的运行状态。配置昆仑通态编程软件。
7. 变频调速单元
变频调速单元采用FR-D700系列FR-D720S,功率0.4KW ,电压380V,多功能端子,电气接口采用多功能端子引出,具有插孔式实验验证和接线式工程训练两种方式,可由学生自主搭建相关电气控制线路。
8. 以太网交换机
采用非网管型工业以太网10/100MBIT/S交换机,自带5个双绞线端口,RJ45接口;采用双电源供电接口,自带LED诊断显示,供电电源DC 24V。
9. 小车运动控制单元
主要由运动小车(直流电机驱动)、同步带轮传动机构、直流电机、光电传感器、电感式传感器、电容式传感器、行程开关等组成,通过传感检测、PLC编程,实现传动控制、键值优化比较行走控制、定向控制、定位控制、报警运行控制、点动控制等,能实现小车的精确定位。该系统外观精美,体积紧凑,重量轻。
10. 二维控制单元
二维控制单元主要由伺服驱动和步进驱动组成。
伺服驱动用于控制Y轴丝杆,采用三菱MR-JE-10C交流伺服驱动及电机,工作电压AC220V,输出功率400W。采用数字信号处理器(DSP)作为控制核心,智能功率模块(IPM)内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,具有较强的温度、湿度、振动等环境适应能力和很强的抗干扰的能力;支持位置、速度和力矩三种方式对伺服马达进行控制。
步进驱动用于控制X轴丝杆,采用直流伺服驱动,工作电压DC24V,输出功率35W;内部集成控制电路和功率电路,具有自检线圈和短路保护等功能。
(4)多功能端子,电气接口采用多功能端子引出,具有插孔式实验验证和接线式工程训练两种方式,可由学生自主搭建相关电气控制线路。
11. 三相交流电机
交流额定电压380V/△接法,转速1400转/min,功率40W,频率50HZ,绝缘等级E级。
维修电工电子电机与职业资格培训考评仿真软件
本软件为apk的格式,可在PC端使用,也可在移动端使用,本软件即可手动设置故障也能自动设置故障,本软件通过电路图中绿色的框选择手动设置故障点(*多可以设置39个故障点),也可以通过系统自动进行随机1个故障点设置,随机两个故障点设置,随机三个故障点设置,随机四个故障点设置,随机五个故障点设置,本软件内有工具箱,元件库,放大镜,电路图等功能,可通过工具箱可选择万用表进行检测,通过元件库选择合适的元件,通过放大镜可以清楚的了解各个元器件及电路。本软件通过电动机星三角启动控制电路故障的设置,并经过种种排查,让学生了解电动机星三角启动控制电路的工作原理及电路结构。
12. 实验连接线
每套配有高可靠护套结构手枪插连接线,无氧铜抽丝而成,插头采用实芯铜质件外套铍轻铜弹片,强弱电导线的插头插座尺寸分开,不可混插,安全可靠。
13. 教师教学设计系统
本软件基于unity3d开发,可选6级画质,设有减速器、轴系结构的设计与虚拟拆装、常见机械机构设计与仿真,机构资源库,典型机械机构(汽油机发动机的虚拟拆装),软件为一个整体软件,不能为一个个单独的资源。
A.减速器设计与虚拟拆装界面可选涡轮蜗杆圆锥齿轮减速器、二级展开式圆柱齿轮减速器、圆锥圆柱齿轮减速器、同轴式圆柱齿轮减速器、圆锥齿轮减速器、一级圆柱齿轮减速器。
涡轮蜗杆圆锥齿轮减速器:进入软件后自动播放装配内容,视频中各步骤均有文字说明
二级展开式圆柱齿轮减速器:进入软件后采用视频的形式播放内容,视频内容应包含:零件名称(扫描二维码可看零部件名称)、拆装演示(包含拆卸、装配)、虚拟拆装(包含整体、低速轴、中速轴、高速轴、箱盖、箱座)
圆锥圆柱齿轮减速器、同轴式圆柱齿轮减速器、圆锥齿轮减速器、一级圆柱齿轮减速器:点击进入后自动跳转到edrawings界面,模型均为三维模型,通过点击零部件显示零部件名称,可360°全方位旋转、放大、缩小、平移,同时可通过移动零部件功能,将整个减速器进行拆卸组装,同时可以选择主页按钮回到减速器*初始的状态。圆锥齿轮减速器、一级圆柱齿轮减速器增加了插入横断面功能,可自由拖动横断面观察减速器内部结构。
B.轴系结构的设计及虚拟拆装界面可选零件认知、拆装演示、实战操作。
1、零件认知:内设斜齿轮、无孔端盖、联轴器、联轴器键、轴、齿轮键、带孔端盖、轴套、深沟球轴承的三维模型与零件名称,任意零件均可进行360°旋转
2、拆装演示:内置2个案例,将鼠标移动到某一零件位置时(底座与轴承座除外),该零件自动放大,并显示零件名称,设有拆卸与装配按钮,功能由软件自动完成轴系结构拆卸与装配。三维场景均可进行360°全方位旋转、放大、缩小、平移。
3、实战操作:三维零件整齐摆放于桌面,由学生手动选择对应的零件并移动至轴系结构上,摆放顺序正确且位置正确时零件才能安装上去,设有重新开始按钮,方便学生重新进行虚拟实验。将鼠标移动到某一零件位置时(底座与轴承座除外),该零件自动放大,并显示零件名称。
C、常见机械机构设计与仿真可选铰链四杆机构设计与分析、III型曲柄摇杆机构设计与分析、偏置曲柄滑块机构设计与分析、曲柄摆动导杆机构设计与分析、铰链四杆机构轨迹综合、偏心直动滚子推杆凸轮、对心直动平底推杆凸轮。
1、各个机构应当能输入相对应的参数,由软件自动计算参数,并可进行运动仿真和自动绘制曲线图。
D、机构资源库可选平面连杆机构11种、凸轮机构5种、齿轮机构6种、传动机构8种、加紧机构11种、轮系机构6种、其他机构(机械设备模拟)8种
E、汽油机发动机的虚拟拆装可选曲轴箱装拆演示、曲轴箱虚拟装配、配气系装拆演示、配气系虚拟装配
1、曲轴箱装拆演示与配气系装拆演示均设有拆卸按钮、装配按钮、重新开始、分解观察按钮,将鼠标移动到某一零件位置时,该零件自动放大,并显示零件名称,功能由软件自动完成轴系结构拆卸与装配。使用分解观察按钮时,曲轴箱或配气系三维模型自动展示爆炸图,可进行360°全方位旋转、放大、缩小、平移
2、曲轴箱虚拟装配与配气系虚拟装配的三维零件均整齐摆放于桌面,均由学生手动选择对应的零件并移动至机构上,当摆放顺序正确且位置正确时零件才能安装上去,设有重新开始按钮,方便学生重新进行虚拟实验。将鼠标移动到某些零件位置时,自动显示零件名称。
14. 机械实训安全教育虚拟仿真软件
本软件基于unity3d开发,软件采用三维漫游的形式,可通过键盘控制移动,鼠标控制镜头方向,设有机械安全距离实验,机械安全保护装置实验、机械安全防护设计基础考核,实验进行时,三维漫游画面采用箭头与脚印图案提示移动至实验位置,机械对象周围圆圈显示了工作半径,实验过程伴有三维机器人的对话框提醒。
A、机械安全距离实验内容包括防止上下肢触及危险区的安全距离实验(内分2种围栏高度与开口大小),选择进入后,镜头前弹出GB23821-2009《机械安全防止上下肢触及危险区的安全距离》要求,错误示范:实验过程为人体进入机械对象工作半径受到伤害后,血色画面与语音提醒收到机械伤害,并回至原位并进行下一实验,*终一步为正确做法。
B、机械安全保护装置实验分为安全联锁开关、安全光幕、安全垫、安全激光扫描仪等保护装置实验,可选类别(安全输入、安全控制、安全输出、其他)、生产厂家、产品列表(安全联锁开关、安全光幕、安全垫、安全激光扫描仪、安全控制器、安全继电器、安全护栏)。安装位置有蓝色闪烁框架提醒,实验流程:选择安全护栏并安装、选择安全连锁开关(或选择安全光幕、安全垫、安全激光扫描仪)并安装、选择安全控制器并安装至电气控制箱、选择安全继电器并安装至电气控制箱、点击电气控制箱上的启动按钮。若进入危险区域时,系统将提示报警音,且机械对象停止工作,选择电气控制箱上的复位按钮可停止。
C、机械安全防护设计基础考核要求完成机械安全系统的安装,正确安装安全护栏、安全联锁开关、安全光幕、安全垫、安全激光扫描仪、安全控制器、安全继电器、24V电源、信号灯及急停按钮,考核分为十个考核点,部分考核点有3个选项,由学生自由选择,*终10项考核点选好后,提交确认,系统自动得出总分数以及各考核点的得分情况。
D、软件须为整体同一平台,不得以单独的资源展现。
E、同时为客户提供本软件的VR安装包方便用户拓展为VR实验,VR设备及软件安装调试不需提供。
六、 实训项目
PLC基本技能实训
MCGS组态棒图实验教学,利用已编辑好组态棒图,对以下任何实验进行动态跟踪教学实验针对实验项目的具体要求,学生自行编辑组态棒图进行实验。
1. PLC认知实训(软硬件结构、系统组成、基本指令、接线、编程下载等)
PLC虚拟控制应用实训
2. 数码显示控制
3. 抢答器控制
4. 天塔之光控制
5. 音乐喷泉控制
6. 十字路口交通灯控制
7. 水塔水位控制
8. 自动送料装车系统控制
9. 四节传送带控制
10. 装配流水线控制
11. 多种液体混合装置控制
12. 自控成型机控制
13. 自动洗衣机控制
14. 电镀生产线控制
15. 自控轧钢机控制
16. 邮件分拣机控制
17. 自动售货机控制
18. 机械手控制控制
19. 四层电梯控制
PLC实物控制应用实训
20. 步进电机定位控制
21. 步进电机的速度控制
22. 步进电机的正反转控制
23. 伺服电机定位控制
24. 伺服电机的速度控制
25. 伺服电机的正反转控制
26. 伺服电机和步进电机的综合控制
典型电动机控制实操实训
27. 三相鼠笼式异步电动机点动和自锁PLC控制
28. 三相鼠笼式异步电动机联动正反转PLC控制
29. 三相鼠笼式异步电动机带延时正反转PLC控制
30. 三相鼠笼式异步电动机Y/△转换起动PLC控制
PLC、变频器、触摸屏综合应用技能实训
31. 变频器功能参数设置与操作
32. 外部端子点动控制
33. 变频器控制电机正反转
34. 多段速度选择变频调速
35. 变频器无级调速
36. 外部模拟量方式的变频调速控制
37. 基于PLC的变频器外部端子的电机正反转控制
38. 基于PLC模拟量方式变频开环调速控制
39. 基于PLC通信方式的变频开环调速
40. 基于触摸屏控制方式的基本指令编程练习
41. 基于触摸屏控制方式的数码显示控制
网络通讯综合实训
42. PLC与变频器通讯实训
43. PLC、触摸屏与变频器通信控制
44. PLC主机之间通讯实训
45. PLC、变频器、触摸屏组网综合应用实训