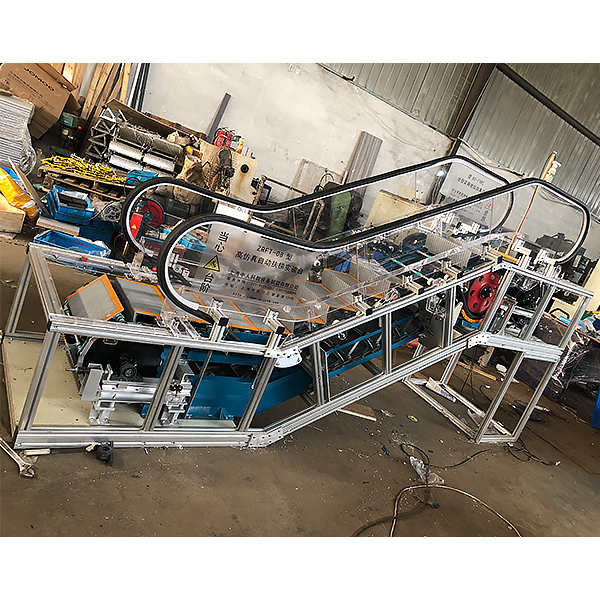
设备概述
透明自动扶梯实训设备,适用于职业院校、中职院校电梯技术专业学员进行自动扶梯操纵和维修保养实训教学训练。本实训设备采用透明扶梯梯级踏板系统、扶手带系统、曳引机系统,设备台架、安全检测系统,电气控制控制系统等。通过本实训系统,能够让学生熟悉常用自动扶梯的工作原理、结构组成、低压控制电器的结构及原理,学生通过分析电气原理图,掌握电梯的安全保护和工作状态,并通过分析测量,找出故障点所在位置,掌握电梯的运行原理及日常维护知识。
1、主要技术参数和性能技术指标
1.1输入电源:单相三线AC220V±10%,工频50Hz;
1.2工作环境:环境温度范围为-5℃~+40℃,相对湿度<85%(25℃);
1.3整机容量:1.5KVA
1.4扶梯尺寸:3400mm(长)×850mm(宽)×1800mm(高)
1.5提升高度:700mm
1.6控制方式:PLC+变频启动。
1.7安全保护:具有保护接地、过载、过流、漏电流保护功能,安全符合国家标准。
2、主要性能指标和主要组成部件
该设备应由桁架、驱动减速机、驱动装置、张紧装置、导轨系统、梯级、梯级链,扶栏扶手带以及各种安全装置所组成。
2.1桁架:它是扶梯的基础构架,扶梯的所有零部件应都装配在这一金属结构的桁架中。扶梯模型中的桁架采用铝型材制作而成。桁架由3部分组成,即上平台、中部桁架与下平台。为保证扶梯处于良好工作状态,桁架刚度高,--扶梯桁架设有中间支承,起支撑作用,并且可随桁架的胀和缩自行调节。
2.2驱动机(以链条式为例):驱动机由电动机、蜗轮蜗杆减速机、链轮、制动器(抱闸)等组成。电动机的安装位置采用立式驱动机。
2.3驱动装置:驱动装置由驱动链轮、梯级链轮、扶手驱动链轮、主轴及制动轮或棘轮等组成。该装置从驱动机获得动力,经驱动链用以驱动梯级和扶手带,从而实现扶梯的主运动,并且应急时具有紧急制动功能,防止乘客倒滑,确保乘客安全。
2.4张紧装置:张紧装置由梯链轮、轴、张紧小车及张紧梯级链的弹簧等组成。张紧弹簧由螺母调节张力,使梯级链在扶梯运行时处于良好工作状态。当梯级链断裂或伸长时,张紧小车上的滚子精确导向产生位移,使其安全装置(梯级链断裂保护装置)起作用,扶梯立即停止运行。
2.5导轨:梯级运行和返回导轨均为透明有机玻璃制成,具有重量轻、相对刚度大、制造精度高等特点,便于装配和调整。
2.6梯级链:梯级链具有永久性润滑的支撑轮进行支撑,梯级链上的梯级轮在导轨系统、驱动装置及张紧装置的链轮上平稳运行;可使负荷分布均匀,防止导轨系统的过早磨损,在反向区两根梯级链由梯级轴连接,保证梯级链整体运行的稳定性。
2.7梯级:梯级由全透明有机玻璃制造。
2.8扶手驱动装置:扶手驱动链通过驱动装置直接驱动,无须中间轴,扶手带驱动轮缘具有耐油橡胶摩擦层,保证扶手带与梯级同步运行。
2.9扶手带:扶手带由多种材料组成,至少包含天然(或合成)橡胶、棉织物(帘子布)。扶手带的标准颜色为黑色。
2.10梳齿、梳齿板、楼层板:
①梳齿:在扶梯出入口处装设梳齿与梳齿板,以确保乘客安全过渡,即使乘客的鞋或物品在梯级上相对静止,也会平滑地过渡到楼层板上。
②梳齿板:梳齿板具有固定梳齿的作用。
③楼层板(着陆板):楼层板既是扶梯的出人口,也是上平台、下平台维修间(机房)的盖板,由有机玻璃制作而成,透明直观。
2.11扶栏:扶栏设在梯级两侧,起保护和装饰作用。
2.12电梯与扶梯检修安装仿真软件:软件采用三维仿真的模式,培养学生的动手能力。软件基于C#和JS语言编程设计,并且软件内的模型均采用3D模型,由3Dmax制作而成,并经过渲染和润色,使模型看起来与真实部件一般无二,设有工具库、部件库、劳保用品库功能,内部工具具有可选功能,软件具有可恢复默认位置与放弃步骤,并可完成以下三维实验功能:检修装置安装位置操作、检修速度答题、检修操作、安全钳安装、测量安全钳与导轨工作面的间隙、调整间隙操作、扶梯梯级安装、梯级辅轮安装、紧固梯级操作、梯级安装检查、选定地坎槽中心线、地坎其余组件拼装。
2.13职业技能综合集成训练虚拟仿真系统:该系统基于unity3d设计,具有交互界面大小功能,用户可自行根据电脑配置选择不同的交互界面大小,可选于六个画质等级。具有多种结构的资源库,其中可选圆柱齿轮轴系部件4种、锥齿轮轴系部件4种、蜗杆轴系部件6种,并且具有安装、拆卸、装配、零部件测量(分为轴测量与底座测量)、考核等功能。零件拆装的步骤过程中具有智能提醒功能,由学生手动选择对应的零件并移动至轴系结构上,只有选择顺序正确零件才能安装上去。软件内的模型均采用3D模型,由3Dmax制作而成,并经过渲染和润色,使模型看起来与真实部件一般无二,并设有非标零件库功能(8种零件)、标准零件库功能(12种零件)、测量工具库功能(可选钢直尺、游标卡尺)供拆装选择。软件内具有实验的目的、步骤、要求等集成的电子实验考核题及指导书等功能。其中使用考核功能时,出题供学生回答,当学生答完题目时可以给出考核分数,题目12题,如每道题目设为8分(其中一题为多选题,占12分),并且只有选择了答案才能进行下一题。软件具有全方位旋转、放大、缩小观看其细节的功能。软件为整体同一平台,不是以单独的资源展现的。
2.14机械实训安全教育虚拟仿真软件:本软件基于unity3d开发,软件具有三维漫游的功能,可通过键盘控制移动,鼠标控制镜头方向,软件具有机械安全距离实验功能,机械安全保护装置实验功能、机械安全防护设计基础考核功能,以上功能进行时,可采取三维漫游画面采用箭头与脚印图案提示移动至实验位置,机械对象周围圆圈显示了工作半径,具有实验过程伴有三维机器人的对话框提醒功能。
A、机械安全距离实验内容功能应包括防止上下肢触及危险区的安全距离实验(内分2种围栏高度与开口大小),选择进入后,具有镜头前弹出GB23821-2009《机械安全防止上下肢触及危险区的安全距离》要求具有,具有错误示范警示功能,如实验过程为人体进入机械对象工作半径受到伤害后,血色画面与语音提醒收到机械伤害,并回至原位并进行下一实验,最终一步为正确做法。
B、机械安全保护装置实验功能中具有安全联锁开关、安全光幕、安全垫、安全激光扫描仪等保护装置实验,该功能中应具有多个选项,至少包含可选类别(安全输入、安全控制、安全输出、其他)、生产厂家、产品列表(安全联锁开关、安全光幕、安全垫、安全激光扫描仪、安全控制器、安全继电器、安全护栏)等。安装时具有蓝色闪烁框架提醒功能,实验内容为以下流程:选择安全护栏并安装、选择安全连锁开关(或选择安全光幕、安全垫、安全激光扫描仪)并安装、选择安全控制器并安装至电气控制箱、选择安全继电器并安装至电气控制箱、点击电气控制箱上的启动按钮。若进入危险区域时,系统将提示报警音,且机械对象停止工作,选择电气控制箱上的复位按钮可停止。
C、机械安全防护设计基础考核功能中可以具有以下功能选择:完成机械安全系统的安装,正确安装安全护栏、安全联锁开关、安全光幕、安全垫、安全激光扫描仪、安全控制器、安全继电器、24V电源、信号灯及急停按钮。考核十个考核点,部分考核点有3个选项,供学生自由选择,应具有自动计算分数功能,最终10项考核点选好后,提交确认,系统应自动得出总分数以及各考核点的得分情况。
D、软件须为整体同一平台,不是以单独的资源展现的。
2.15设备主要部件
| 序号 | 名称 | 数量 | 单位 | 备注 |
| 1 | 扶梯电气桁架系统 | 1 | 套 | |
| 2 | 扶梯支撑固定架 | 1 | 套 | 20*80mm铝型材制作 |
| 3 | 实训台 | 1 | 套 | 1500*700*1450mm |
| 4 | 扶梯拆装实训工具 | 1 | 套 |
2.16扶梯主要配件材质
| 序号 | 内 容 |
| 1 | 扶梯结构桁架 :铝型材 |
| 2 | 扶手支架型材 :铝型材 |
| 3 | 护壁板 :透明有机玻璃 |
| 4 | 内盖板 :有机玻璃材料 |
| 5 | 外盖板 :有机玻璃材料 |
| 6 | 围裙板 :有机玻璃材料 |
| 7 | 梯级 :有机玻璃,梯级宽度:400mm |
| 9 | 扶手带 :黑色 |
| 10 | 前沿板及盖板 :有机玻璃材料 |
| 11 | 梳齿保护 :合成树脂(黄色) |
| 12 | 桁架保护 :4mm透明有机玻璃板 |